
1. 概述
Master 7 提供七自由度主动力反馈,是目前用途比较广泛的触觉设备,具备旋转感应和主动抓取功能。设备全重力补偿和无漂移校准的结合,有助于提高用户操作的舒适度和准确性。Master 7 七自由度力反馈主手设备广泛适用于:
>医疗机器人和空间机器人
>微型和纳米机器人
>遥控操作台
>虚拟模拟
>训练系统
>研究
2. 结构
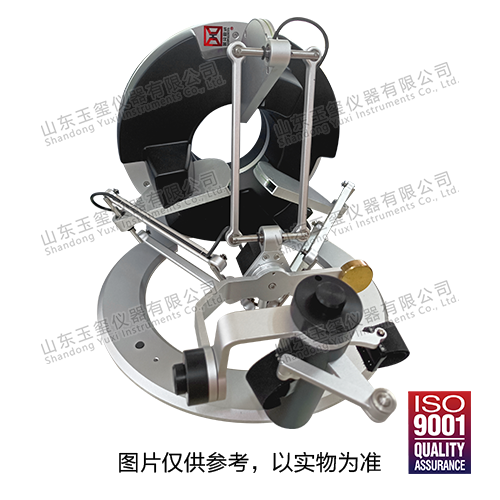
Master触觉设备在精密机械结构的基础上,将轻巧的铝制金属杆和牢固的传动装置完美地结合在一起。和触觉设备常用的其它结构设计相比,该产品极大地减少了惯性效应。此外,Master采用的平行机械设计将整体结构的硬度和坚固性提升到一个超乎想象的水平,从而使其成为桌面应用程序中最为坚实耐用、牢固可靠的点接触型触觉设备。
Master 7的交互机构有7个自由度,可以看成是由精密并联机构、腕关节机构及夹手机构3个部分串联组成。
精密并联机构:提供三自由度平移运动,用于采集操作手的移动位置。
腕关节机构:提供三自由度旋转运动,其3个旋转轴轴线交于一点,相邻连杆转轴相互垂直;用户操作腕关节机构手柄,从而采集操作者腕部的转动姿态。
夹手机构:提供一个自由度的旋转夹取运动,用于采集用户手指的夹取动作,夹手机构布置在腕关节末端构件上。
3. 主要参数
工作空间
平移
∅160mm × 110mm
控制距离
25mm
旋转
240° × 140°× 180°
力
解析力
12N
控制力
± 8.0 N
解析度
解析精度
<0.01mm
转动精度
0.09°
控制精度
0.006mm
刚度
闭环
14.5 N / mm
设备尺寸
h×w×d
270×300×350mm
接口
刷新率
高达4KHZ
工作电压
╱
110V - 240V
工作平台
微软
Windows
Linux
╱
Apple
macOS
软件开发包
╱
haptic SDKrobotic SDK
结构
╱
基于delta的并联动力学结构
以手为中心的解耦旋转
主动的重力补偿
校准
╱
自动校准/无漂移
用户输入
╱
力反馈可编程按钮
安全性
╱
速率监控电磁阻尼
可选择
╱
左手/右手
备注:目前宣传产品为常规机型,可根据客户要求定制。
在线沟通,请点我在线咨询
咨询热线:
0531-82687977
客服qq:
188031986
